一种偏摆调节系统及调节方法与流程
1.本发明涉及一种偏摆调节系统及调节方法,属于工程机械技术领域。
背景技术:
2.随着社会的发展,工程机械特别是挖掘机在工程建设中越来越必不可少,市场对挖掘机动臂响应的精确度要求也越来高,动臂的速度及精确响应度直接影响整个挖掘机的作业效率。
3.在动臂进行左右偏摆动作时,左右两个方向的偏摆速度会因比例电磁阀性能差异及油缸大小腔等因素而存在差异,调节较为困难,现有技术通过人工计算动臂左右偏摆时间,并根据速度手动对电流进行补偿调节,该种方法无法做到精准调节,而且费时费力。
技术实现要素:
4.本发明的目的在于克服现有技术中的不足,提供一种偏摆调节系统及调节方法,实现动臂偏摆速度的自动校准。
5.为达到上述目的,本发明是采用下述技术方案实现的:
6.第一方面,本发明提供了一种偏摆调节系统,包括动臂和用于驱动动臂的左偏摆比例电磁阀、右偏摆比例电磁阀,还包括:
7.角度传感器,所述角度传感器用于获取当前动臂偏摆角度,并通过can信号传递给仪表;
8.仪表,所述仪表用于根据当前动臂偏摆角度对位置进行判断,并传递给控制器;
9.控制器,用于对左偏摆比例电磁阀、右偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作。
10.第二方面,本发明提供一种偏摆调节方法,包括:
11.接收预先获取的当前动臂偏摆角度,根据当前动臂偏摆角度对位置进行判断,并传递给控制器;其中,控制器控制动臂进行左偏或右偏动作;
12.获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
;
13.对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致。
14.进一步的,所述控制器控制动臂进行左偏或右偏动作,包括:
15.控制器对左偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂到达最左侧位置;
16.控制器对右偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂到达最右侧位置。
17.进一步的,所述获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
,包括:
18.仪表通过控制器对右偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
右;
19.仪表通过控制器对左偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
左
。
20.进一步的,所述对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致,包括:
21.仪表对t
右
和t
左
进行对比计算,并以此调节控制器对左右偏摆比例电磁阀的电流值,并重复之前动作,多次记录t
右
和t
左
,最终使t
右
和t
左
近似相同,达到动臂左右偏摆速度一致。
22.第三方面,本发明提供一种偏摆调节装置,包括:
23.接收判断单元,用于接收预先获取的当前动臂偏摆角度,根据当前动臂偏摆角度对位置进行判断,并传递给控制器;其中,控制器控制动臂进行左偏或右偏动作;
24.获取单元,用于获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
;
25.对比计算及调节单元,用于对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致。
26.第四方面,本发明提供一种偏摆调节装置,包括处理器及存储介质;
27.所述存储介质用于存储指令;
28.所述处理器用于根据所述指令进行操作以执行根据前述任一项所述方法的步骤。
29.第五方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前述任一项所述方法的步骤。
30.与现有技术相比,本发明所达到的有益效果:
31.本发明提供一种偏摆调节系统及调节方法,通过角度传感器判断动臂所在位置,自动进行动臂左偏及右偏动作,并通过仪表智能进行速度对比,对比后通过增加减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致,本发明可快速精准调节动臂左右偏摆速度,提高挖掘机机具操控性、舒适性、一致性。
附图说明
32.图1是本发明实施例提供的一种偏摆调节系统的结构示意图;
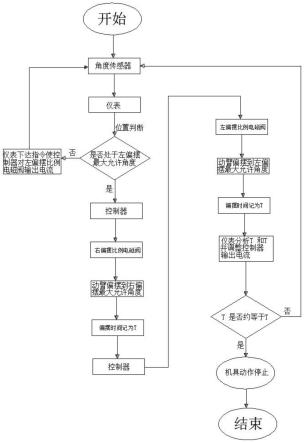
33.图2是本发明实施例提供的一种偏摆调节方法的流程图。
具体实施方式
34.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
35.实施例1
36.本实施例介绍一种偏摆调节系统,包括:
37.包括动臂和用于驱动动臂的左偏摆比例电磁阀、右偏摆比例电磁阀,还包括:
38.角度传感器,所述角度传感器用于获取当前动臂偏摆角度,并通过can信号传递给仪表;
39.仪表,所述仪表用于根据当前动臂偏摆角度对位置进行判断,并传递给控制器;
40.控制器,用于对左偏摆比例电磁阀、右偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作。
41.如图1所示,本实施例提供的偏摆调节系统包括角度传感器、控制器、仪表、左偏摆比例电磁阀、右偏摆比例电磁阀、动臂等。
42.在仪表上设定好动臂左偏摆允许的最大角度及右偏摆允许的最大角度,通过仪表校准开关开启动臂自动校准调节程序。程序开启后,角度传感器获取当前动臂偏摆角度,并通过can信号传递给仪表,仪表根据当前动臂偏摆角度对位置进行判断,并传递给控制器,通过控制器对左偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂已到达最左侧位置,然后仪表通过控制器对右偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
右
。然后仪表通过控制器对左偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
左
。仪表对t
右
和t
左
进行对比计算,并以此调节控制器对左右偏摆比例电磁阀的电流值,并重复之前动作,多次记录t
右
和t
左
,最终使t
右
和t
左
近似相同,达到动臂左右偏摆自动校准调节的目的。
43.实施例2
44.本实施例提供一种偏摆调节方法,包括:
45.接收预先获取的当前动臂偏摆角度,根据当前动臂偏摆角度对位置进行判断,并传递给控制器;其中,控制器控制动臂进行左偏或右偏动作;
46.获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
;
47.对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致。
48.进一步的,所述控制器控制动臂进行左偏或右偏动作,包括:
49.控制器对左偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂到达最左侧位置;
50.控制器对右偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂到达最右侧位置。
51.进一步的,所述获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
,包括:
52.仪表通过控制器对右偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
右;
53.仪表通过控制器对左偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
左
。
54.进一步的,所述对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致,包括:
55.仪表对t
右
和t
左
进行对比计算,并以此调节控制器对左右偏摆比例电磁阀的电流值,并重复之前动作,多次记录t
右
和t
左
,最终使t
右
和t
左
近似相同,达到动臂左右偏摆速度一致。
56.下面结合附图进一步说明:
57.如图2所示,在仪表上设定好动臂左偏摆允许的最大角度及右偏摆允许的最大角度,通过仪表校准开关开启动臂自动校准调节程序。程序开启后,角度传感器获取当前动臂偏摆角度,并通过can信号传递给仪表,仪表根据当前动臂偏摆角度对位置进行判断,并传递给控制器,通过控制器对左偏摆比例电磁阀进行电流输出,驱动动臂进行偏摆动作,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,此时仪表判定动臂已到达最左侧位置,然后仪表通过控制器对右偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到右偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
右
。然后仪表通过控制器对左偏摆比例电磁阀进行电流输出,同时开始计时,当角度传感器获取到左偏摆允许的最大角度时,仪表控制动臂停止动作,并停止计时,时间记为t
左
。仪表对t
右
和t
左
进行对比计算,并以此调节控制器对左右偏摆比例电磁阀的电流值,并重复之前动作,多次记录t
右
和t
左
,最终使t
右
和t
左
近似相同,达到动臂左右偏摆自动校准调节的目的。
58.实施例3
59.本实施例提供一种偏摆调节装置,包括:
60.接收判断单元,用于接收预先获取的当前动臂偏摆角度,根据当前动臂偏摆角度对位置进行判断,并传递给控制器;其中,控制器控制动臂进行左偏或右偏动作;
61.获取单元,用于获取动臂从最左侧向右偏摆允许的最大角度时的时间,记为t
右
,以及获取动臂从最右侧向左偏摆允许的最大角度时的时间,记为t
左
;
62.对比计算及调节单元,用于对t
右
和t
左
进行对比计算,对比后通过增加或减少比例电磁阀电流控制偏摆速度,达到左右偏摆速度一致。
63.实施例4
64.本实施例提供一种偏摆调节装置,包括处理器及存储介质;
65.所述存储介质用于存储指令;
66.所述处理器用于根据所述指令进行操作以执行根据实施例2中任一项所述方法的步骤。
67.实施例5
68.本实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现实施例2中任一项所述方法的步骤。
69.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种水下隧道变形缝内装可卸式...
- 一种具有位移监测功能的基坑支...
- 一种糯米灰浆铺筑施工方法与流...
- 一种高坝下泄水流装置及下泄方...
- 一种挖掘机多功能电子监控系统...
- 一种大型沉井高效取土装置的制...
- 弧形梁顶进用的承插式可回收掘...
- 一种大直径单桩基础防冲刷保护...
- 一种工程用支护桩基坑支护装置...
- 一种地下车库顶板后浇带加固装...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1