多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法
本发明属于深海取样钻机,具体是涉及一种多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法。
背景技术:
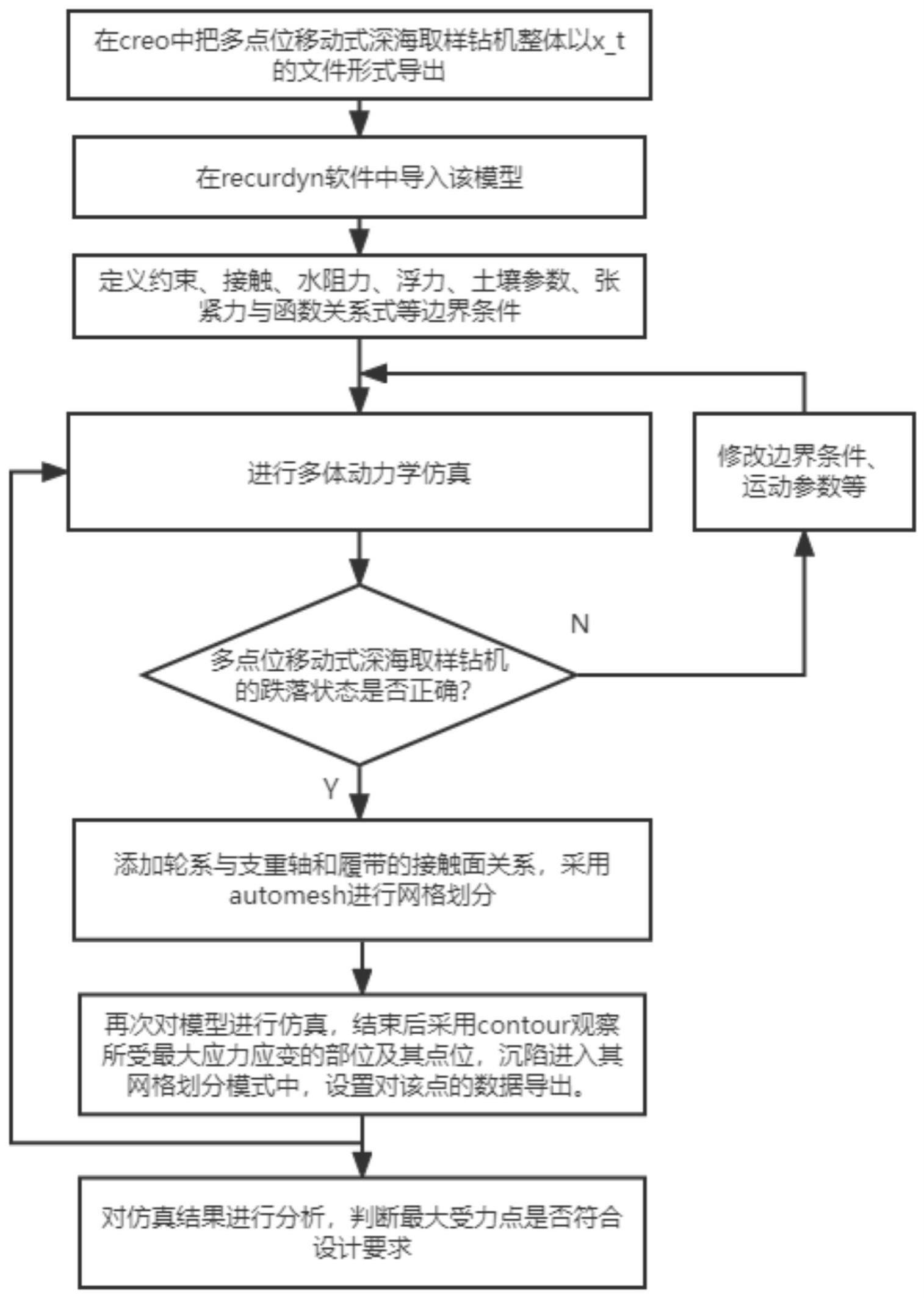
1、本发明仿真对象基于专利cn214576757u所设计的多点位移动式深海取样钻机,在对深海海底地质勘察作业中,其初始释放到与深海底面发生接触碰撞时,底盘将整车所受的大部分冲击力作用于其底盘各部件上,为使多点位移动式深海取样钻机后续的行走取样等工作正常运行,需要对该多点位移动式深海取样钻机进行着陆工况的多体动力学仿真分析。本发明利用recurdyn多体动力学软件,对底盘上钢制轮系进行有限元的柔性化处理,进行多点位移动式深海取样钻机的不同条件着底仿真,得到各个轮的应力应变结果,为多点位移动式深海取样钻机的安全下放提供理论依据与数据支撑。
2、目前,对该类多点位移动式深海取样钻机的仿真方法是利用ansys进行整体式自动划分网格,再进行着底的碰撞仿真,这类技术无法模拟橡胶履带的张力以及深海沉积物特性对整体的一个缓冲性能,简化了关键部件直接的相互作用力,会对仿真的真实结果造成误差,无法精准的判断出实际所能接受的释放高度及着底的坡度。
3、多点位移动式深海取样钻机在着底时所受的冲击力与释放高度有关以外,还与自重、浮力、水阻力、不同底质的特性和履带的初始张紧力相关,受试验条件的限制很难在深海原位进行多次的投放,借助recurdyn软件实现对这些特殊环境的构建,以模拟多点位移动式深海取样钻机真实着底环境。
技术实现思路
1、为了解决上述技术问题,本发明提供一种能实现橡胶履带的工作性能模拟,最大程度地模拟海洋洋流与底质的环境的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法。
2、本发明采用的技术方案是:一种多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法,用于申请号为202120499131.4中的多点位移动式深海取样钻机的底盘轮系刚柔耦合动力学仿真;所述底盘轮系包括引导轮、托轮、支重轮及传动轮;传动轮与行走马达的输出轴连接;每组引导轮、托轮、支重轮、传动轮上包绕履带;车架固定安装在履带架上;行走马达与液压装置连接,底板与履带架铰接;
3、包括以下步骤:
4、1)根据多点位移动式深海取样钻机实际结构建立多点位移动式深海取样钻机的三维模型,将其导入多体动力学分析软件recurdyn中;使用track_lm子系统对底盘轮系及履带进行实体替换;并根据各零部件功能的不同对零部件使用合并命令进行组合,将多点位移动式深海取样钻机多体动力学模型划分为视觉装置、多点位取样装置、行走车及液压装置的组合体;
5、2)根据各个部件之间的实际连接方式,在多体动力学分析软件recurdyn中使用连接副将不同部件进行连接:所述的视觉装置安装固定在行走车上;多点位取样装置安装固定在行走车的前端;摆动液压缸一端与车架铰接,另一端与立柱的上端铰接;液压马达安装固定在底板上;车架固定安装在履带架上;引导轮、托轮、支重轮、传动轮布置于履带架之上;传动轮与行走马达的输出轴连接;
6、3)在ground内建立底质模型,设置不同跌落高度、坡度的模型;对多点位移动式深海取样钻机施加一个竖直向上的力,以模拟多点位移动式深海取样钻机着底过程中所受到的水动力;设置底质的土壤参数,模拟深海海底环境;
7、4)对底盘轮系进行八节点单元六面体网格划分,柔性化处理,生成网格时设置全局网格最大与最小尺寸,预览网格及其接触点位信息并保留网格;
8、5)设置仿真条件,进行仿真实验;根据仿真结果分析底盘轮组的受力情况,对发生应力应变最大的部件进行数据分析。
9、上述的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法中,步骤1)的具体操作过程如下:
10、在三维软件creo中建立多点位移动式深海取样钻机的三维模型,将多点位移动式深海取样钻机的三维模型以x_t的文件形式保存,在recurdyn软件中,进入track_lm的子系统中将该多点位移动式深海取样钻机模型导入;
11、对底盘轮系及履带进行实体替换具体步骤如下:首先,分别进入引导轮、托轮、支重轮、传动轮的体编辑模式,调整轮面平行于xoy平面,把质心移至参考系起始点(0,0,0),再把模型以x_t形式导出,删除原有模型,导入处理好坐标的模型;然后对传动轮采用cadsprocket进行实体替换,对传动轮齿廓采用import在模型上取齿廓线,再输入轮齿的数量及齿顶高、齿根圆半径等来绘制cad传动轮;确定后再次进入新的传动轮的体编辑模式,使用face功能建立两个与履带进行接触的平面;然后对引导轮、托轮、支重轮采用cad_singleflange 进行实体替换,对于引导轮、托轮、支重轮,分别在参数表中输入所需的轮毂宽度、轮毂半径、总宽度,两个轮毂之间的距离 ;然后对履带采用cad_link进行实体替换,根据实物的尺寸,在参数表中输入履带齿的齿高、齿宽、孔间距在对齿廓的绘制时,采用multi curve在履带板上依次点过外廓线,完成后设置履带与底质的接触点,使用shoepoint对履带的第5至25个点进行定义,同时在grouser mesh中选择start node为5,endnode为25,进入side contact,选中与传动轮的左右接触面,以及履带与引导轮、托轮、支重轮内侧及轮毂圆周的接触面进行定义;底盘轮系与履带建模完成后,调整各个轮的位置,采用assembly将履带装配于底盘轮系上;
12、实体替换完成后,对多点位移动式深海取样钻机剩余零部件进行合并,具体操作如下:在home中点击merge,选中光源、相机和镜头的零件,进行合并,在target body中命名为视觉装置;选中液压马达 、安装座、钻杆、立杆、转接头、托盘、立柱、拧卸装置、转盘、钻头、液压马达b 、齿轮、底板、液压缸、摆动液压缸和电磁阀,进行merge合并,在target body中命名为多点位取样装置;选中履带架与车架的全部零部件,将其分别进行merge合并,在target body中命名为履带架与车架。
13、上述的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法中,步骤2)的具体操作过程如下:
14、在视觉装置与行走车之间采用固定副的连接方式,点击joint中的fix,先选择视觉装置,再点击行走车,最后点击视觉装置与行走车连接点位作为固定副的位置;在多点位取样装置与行走车之间采用固定副的连接方式,点击joint中的fix,先选择多点位取样装置,再点击行走车,最后点击多点位取样装置与行走车连接点位作为固定副的位置;在摆动液压缸与车架和立柱连接处采用转动副的连接方式,点击joint中的revolute,先选择摆动液压缸,再点击车架和立柱,最后点击摆动液压缸与车架和立柱旋转点位作为旋转副的位置;点击joint中的fix,先选择液压马达,再点击底板,最后点击液压马达与底板连接点位作为固定副的位置;点击joint中的fix,先选择车架,再点击履带架,最后点击车架与履带架连接点位作为固定副的位置;点击joint中的revolute,先选择引导轮、托轮、支重轮、传动轮,再点击履带架,最后点击引导轮、托轮、支重轮、传动轮与履带架旋转点位作为旋转副的位置。
15、上述的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法中,步骤3)的具体操作过程如下:
16、在professional中选择ground,进行地面的建立,对于平面底质选用长5m,宽5m高1m的长方体;建立多个文件,在多个文件中设定底质与多点位移动式深海取样钻机的高度距离,并使得不同文件中底质与多点位移动式深海取样钻机的高度距离互不相同;设定底质与多点位移动式深海取样钻机的高度距离操作如下:选择measure中的distance,firstpoint选择履带最底部位置的点位,second point 选择底质上表面一点,点击calculate计算履带直接的距离,选择basic object control,选中底质长方体,输入计算得到所需上升或下降的距离,点击+y或-y可调整至目标位置;
17、为对多点位移动式深海取样钻机施加一个竖直向上的力以模拟多点位移动式深海取样钻机着底过程中所受到的水动力,设置该竖直向上的力的具体操作如下:首先选择measure中的mass,选中多点位移动式深海取样钻机整体,点击calculate得到多点位移动式深海取样钻机质心,复制该质心,点击axial force,依次选择底质与多点位移动式深海取样钻机,输入质心坐标为起点,修改基点的y坐标为0,再输入质心坐标为终点坐标;设置底质的土壤参数时,通过右侧database进入trackassembly中,勾选pressure-sinkage并点击contact parameter,输入深海沉积物的内聚变形模量、摩擦变形模量、沉陷指数、凝聚力、抗剪切角、剪切变形模量与沉陷比,确定后完成对深海沉积物的模拟。
18、上述的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法中,步骤4)的具体操作过程如下:
19、对于传动轮,点击右键选择mesh进入网格划分模块,选择advanced mesh,网格类型为solid_hexa8,最大网格尺寸为12,最小网格尺寸为4,点击mesh生成网格,点击fflexedit中的output,选择add by set,点击传动轮上的平面进行输出点选择;对于引导轮,网格类型为 solid4_tetra4,最大网格尺寸为20,最小网格尺寸为15,生成网格后进行输出点选择;对于拖轮,网格类型为solid_hexa8,最大网格尺寸为15,最小网格尺寸为10,生成网格后进行输出点选择;对于支重轮,网格类型为solid_hexa8,最大网格尺寸为15,最小网格尺寸为10,生成网格后进行输出点选择。
20、上述的多点位移动式深海取样钻机底盘轮系耦合动力学仿真方法中,步骤5)的具体操作过程如下:
21、点击analysis中的dynamic/kinematic analysis,设置end time为2s,step为100,maximum time step为0.001,点击simulate开始进行仿真。
22、与现有技术相比,本发明具有如下有益效果:
23、1、本发明保留所需分析部件的具体特征,在仿真时能对发生接触的面添加接触,根据深海底质的不同修改不同底质的数据参数,使得分析结果更贴近真实情况。
24、2、本发明在多点位移动式深海取样钻机的质心处添加计算所得的浮力及着底过程中的水阻力,实现对深海环境对多点位移动式深海取样钻机影响的真实模拟。
25、3、本发明融合recurdyn软件的快速网格生成与底质接触的优势,利用履带子系统的多体动力学算法,将底盘轮系这类关键零部件柔性化,与履带系统建立起刚柔耦合的动力学模型,能够分析整体多点位移动式深海取样钻机的关键零部件在着底沉陷时受应力应变情况。
- 屏幕检测方法、屏幕检测装置及...
- 一种云档案系统中档案原文本地...
- 健康信息核验方法、装置、设备...
- 一种结合源监督和目标无监督信...
- 信息生成方法、装置、电子设备...
- 一种搜索结果的展示方法及装置...
- 山火烟雾检测模型的训练方法及...
- 一种基于模糊测试自动化挖掘非...
- 一种字符检测方法和装置、电子...
- 一种数据处理方法、装置、电子...
- 还没有人留言评论。精彩留言会获得点赞!