一种电机换相控制电路的制作方法
一种电机换相控制电路
【技术领域】
1.本实用新型涉及一种电机控制的技术领域,特别涉及一种电机换相的控制电路。
背景技术:
2.现有的无刷电机进行换相都通过检测悬空相绕组的反电动势波形,采集其过零点后延迟预设时间间隔进行换相,以实现马达的驱动,通过控制器给驱动电路发送pwm信号,且在pwm信号的on阶段进行采集反电动势电压并判断是否达到过零点,但通常电机的换相时间由电机的转速改变,当电机高速运转时,换相时间减小,若pwm信号的频率不变,即在减小的换相时间内pwm信号的个数减少,采集反电动势的个数减少,其检测的精度降低,且采集过零点需计算延时时间以换相,增加控制逻辑,换相效率低、精度低。
3.因此,有必要设计一种效率高且精度高的电机换相控制电路,以解决上述问题。
技术实现要素:
4.针对现有技术的不足,本实用新型的目的在于提供一种效率高且精度高的电机换相控制电路。
5.本实用新型解决现有技术问题可采用如下技术方案:一种电机换相控制电路,包括:电源正、负极端子、驱动电路、pwm信号产生电路、控制器及反电动势检测电路,所述正、负极端子通过驱动电路连接于电机,所述驱动电路通过pwm信号产生电路连接于控制器,所述控制器通过反电动势检测电路连接于所述电机以接收所述电机转速,所述电机换相控制电路还包括换相计算模块,所述反电动势检测电路通过换相计算模块连接于所述控制器,所述控制器内部存储有电机转速及pwm信号频率的对应关系,所述控制器接收电机转速并发出对应的pwm信号给所述驱动电路以驱动所述电机,所述换相计算模块基于pwm信号及电机转速输出换相信号给所述控制器并进行换相。
6.进一步改进方案为:所述电机换相控制电路还包括连接于所述反电动势检测电路与所述控制器之间的转速检测模块,所述转速检测模块基于所述反电动势检测电路计算所述电机转速,并发送至所述控制器。
7.进一步改进方案为:所述控制器内部存储的pwm信号频率与转速呈正向关系。
8.进一步改进方案为:所述换相计算模块连接于所述转速检测模块及所述控制器,所述换相计算模块存储电机转速及换相设定值的关系,并根据转速选择对应的换相设定值关系,以输出换相信号给所述控制器并进行换相。
9.进一步改进方案为:所述电机包括三相绕组,所述控制器控制两相绕组导通,所述反电动势检测电路检测悬空相的反电动势,所述反电动势包括上升沿及下降沿,所述pwm信号包括on阶段及off阶段,一个所述on阶段及一个所述off阶段的持续时间为pwm信号周期,周期的倒数为pwm信号频率。
10.进一步改进方案为:所述换相计算模块在所述pwm信号的on阶段采样反电动势。
11.进一步改进方案为:所述换相设定值为电源电压的百分比值,所述百分比值与电
机转速呈正向关系。
12.进一步改进方案为:所述电机为无刷电机。
13.与现有技术相比,本实用新型具有如下有益效果:控制器内部存储有电机转速及pwm信号频率的对应关系,控制器接收电机转速并发出对应的pwm信号给驱动电路以驱动电机,换相计算模块基于pwm信号及电机转速输出换相信号给控制器并进行换相,根据转速改变pwm信号频率及换相信号以实现高精度换相,根据转速改变pwm信号频率及换相信号以实现高精度、高效率换相。
【附图说明】
14.下面结合附图对本实用新型的具体实施方式做进一步详细的说明:
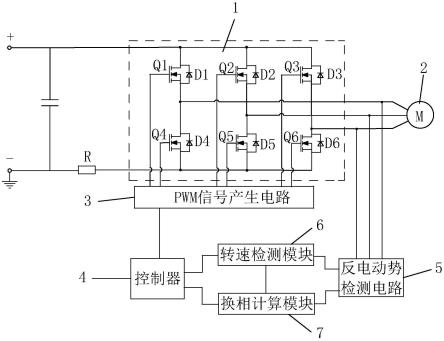
15.图1是本实用新型电机换相控制电路的电路图;
16.图2是本实用新型电机转速为1000rpm时的反电动势波形;
17.图3是本实用新型电机转速为10000rpm时的反电动势波形。
18.图中附图标记的含义:
19.1、驱动电路2、电机3、pwm信号产生电路4、控制器5、反电动势检测电路6、转速检测模块7、换相计算模块
【具体实施方式】
20.下面结合附图和实施方式对本实用新型作进一步详细说明。
21.请参阅图1所示,为本实用新型涉及的一种电机换相控制电路,所述电机控制电路包括电源正、负极端子,所述正、负极端子通过驱动电路1连接于电机2,所述驱动电路1通过pwm信号产生电路3连接于控制器4,所述控制器4通过反电动势检测电路5连接于所述电机2以接收电机转速,所述反电动势检测电路5与所述控制器4之间设有转速检测模块6及换相计算模块7,所述转速检测模块6连接于所述反电动势检测电路5用于计算所述电机转速,所述控制器4内部存储有电机转速及pwm信号频率的对应关系,所述控制器4接收电机转速并发出对应的pwm信号给所述驱动电路1以驱动所述电机2,所述换相计算模块7连接于所述转速检测模块6及所述控制器4,并基于pwm信号及电机转速输出换相信号给所述控制器4并进行换相。
22.所述电机2为无刷电机,本实施方式中,以三相绕组星形连接为例,所述驱动电路1包括第一桥臂、第二桥臂、第三桥臂,每个桥臂连接于电源正、负极端子之间,第一桥臂由串联连接的第一开关管q1(也称上开关)和第四开关管q4(也称下开关)组成;第二桥臂由串联连接的第二开关管q2(也称上开关)和第五开关管q5(也称下开关)组成;第三桥臂由串联连接的第三开关管q3(也称上开关)和第六开关管q6(也称下开关)组成,所述电机2的三相绕组分别连接于每个桥臂的中点,所述控制器4发送pwm信号至所述pwm信号产生电路3,所述pwm信号产生电路3控制所述驱动电路1的其中一个桥臂的上开关管以及其他任一桥臂的下开关管两两导通,同一桥臂的上下两个开关管不可同时导通,以控制每次两相绕组导通,因此,该驱动电路1可以分别以以下六种状态控制开关管导通:q1q5导通、q1q6导通、q2q4导通、q2q6导通、q3q4导通、q3q5导通,通过六种状态的切换实现所述电机2的换相,使电流以顺序的方式流过每个线圈,通过线圈的电流流动产生的磁场与转子的磁体相互作用,永磁
体转子的磁极改变从而发生转动。所述反电动势检测电路5检测悬空相绕组的反电动势,所述转速检测模块6基于所述反电动势检测电路5计算所述电机转速,并发送至所述控制器4,pwm信号包括on阶段及off阶段,一个所述on阶段及一个所述off阶段的持续时间为pwm信号周期,周期的倒数为频率,所述控制器4通过转速的改变而改变pwm信号的频率。
23.所述控制器4接收电机转速并发出对应的pwm信号给所述pwm信号产生电路3,所述pwm信号产生电路3将改变后的pwm信号发送至驱动电路,以改变所述电机2的转速。pwm信号频率与转速呈正向关系,所述pwm信号频率随着控制器4接收的转速的增大而增大。所述换相计算模块7基于pwm信号及电机转速输出换相信号给所述控制器4并进行换相,其在所述pwm信号的on阶段进行采样,所述换相计算模块7存储电机转速及换相设定值的关系,并根据电机转速选择对应的换相设定值关系,以输出换相信号给所述控制器4并进行换相,所述换相设定值为电源电压的百分比值,所述百分比值与转速呈正向关系,所述百分比值随转速的增加而增加。
24.如图2所示,为电机转速为1000rpm时的反电动势波形,所述反电动势包括上升沿及下降沿,所述上升沿为换相时间,所述控制器4存储有三相绕组电机转速及与转速对应的换相时间,还存储有转速及pwm信号频率关系,所述转速与对应的换相时间呈反向关系,即所述换相时间随转速的增加而减小,本实施方式中,以保证反电动势的采集个数,至少设置为3个,所述一个pwm信号频率对应多个转速,即一个pwm信号频率对应一个转速区间,所述转速区间为1000rpm,当然,在其他实施方式中,转速区间可设为其他值。以旋转永磁体转子为2对极为例,若转速为1000rpm时,对应的换相时间为5ms,其对应的pwm信号频率为5k,即pwm信号的周期为0.2ms,由于在换相时会产生尖峰,因此需除去消磁时间后进行检测,本实施方式中,消磁时间为换相时间的一半,即在时间a开始进行采集,在2.5ms内,pwm信号的个数为12个(附图省略部分pwm信号),且对应的换相设定值为电源电压的40%,即所述换相计算模块7在pwm信号on阶段进行采样的个数为12次,且当检测到反电动势为电源电压u的40%时,所述换相计算模块7输出换相信号给所述控制器4并进行换相。
25.如图3所示,为电机转速为10000rpm时的反电动势波形,所述转速增加,其对应的换相时间减小为0.5ms,若pwm信号频率不变,则在换相时间内,只能输出1个pwm信号,根据控制器4存储的转速及pwm信号频率关系,所述pwm信号频率为20k,即pwm信号的周期为0.05ms,除去消磁时间后,即在时间b开始进行采集,在0.25ms内,pwm信号的个数为5个(附图省略部分pwm信号),以保证采集反电动势的数量。且对应的换相设定值为电源电压的70%,当检测到反电动势为电源电压的70%时,所述换相计算模块7输出换相信号给所述控制器4并进行换相。转速改变,通过使与其对应的pwm信号频率改变,保证在换相时间内有足够的采样次数,以准确采集反电动势,确保准确换相。
26.本实用新型电机换相控制电路通过控制器内部存储有电机转速及pwm信号频率的对应关系,控制器接收电机转速并发出对应的pwm信号给驱动电路以驱动电机,换相计算模块基于pwm信号及电机转速输出换相信号给控制器并进行换相,根据转速改变pwm信号频率及换相信号以实现高精度换相。
27.本实用新型不局限于上述具体实施方式。本领域普通技术人员可以很容易地理解到,在不脱离本实用新型原理和范畴的前提下,本实用新型的电机换相控制电路还有其他很多的替代方案。本实用新型的保护范围以权利要求书的内容为准。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种立式电机制动装置及立式电...
- 一种用于电动机的安装结构的制...
- 一种新型气体绝缘环网柜的制作...
- 一种宽范围输出的可调恒压高频...
- 一种旋转小车头防下坠结构的制...
- 一种便携式供电设备的制作方法
- 基于熔融盐和电储能直挂调频系...
- 设备状态监控装置和状态监测终...
- 一种火电熔盐加蓄电池混合储能...
- 一种桥架连接结构的制作方法
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1