谷歌重磅:可以优化自己的优化器!手动调参或将成为历史!?

本文首发于微信公众号【夕小瑶的卖萌屋】
文 | 小轶
编 | @夕小瑶
背景
Google Brain团队发布的一篇最新论文在外网引发热议,或将成为Deep Learning发展历程上里程碑式的工作。它所讨论的,是所有AI行业者都要面对的——Deep Learning中的优化问题。也就是,如何更好地训练一个模型。
深度模型的训练过程是非常困难的,常见的挑战包括:陷入局部极小值、梯度消失/爆炸、长期依赖(long dependency)等等。但对于大多数算法工程师来说其实并没有这么复杂。因为学术界早已陆续提出了许多卓有成效的优化器,比如AdaGrad、Adam、Momentum等等,都可以一定程度解决上述种种问题。而算法工程师搭完模型后,需要做的只有一件事——调参 :)

如果说深度学习的兴起为算法工程师省去了繁琐的特征工程(特征设计与特征选择),今天介绍的Google这篇工作就是致力于为大家省去繁琐的“调参工程”(优化器设计与优化器选择)。
深度学习用大量的训练数据替代了特征工程,同样的道理,这篇工作致力于用大量训练任务和模型来替代人工设计的优化器(Adam、Momentum等),这种以任务和模型为食的general-purpose的优化器模型,就称之为learned optimizer,可广泛适用于各类任务,无需手动调节优化器参数(如学习率,batch size…)。
实验不仅证明了learned optimizer的普适性,更是发现了这种优化器的一些惊人特性。比如,它甚至可以根据训练过程中的validation loss,隐性地做到正则化规约。最令人惊叹的是,该优化器甚至可以用来从头训练一个新的general-pupose优化器——也就是说,这是一个可以自己优化自己的优化器!
论文题目:
《Tasks, stability, architecture, and compute: Training more effective learned optimizers, and using them to train themselves》
论文链接:
https://arxiv.org/pdf/2009.11243.pdf
方法
接下来,我们就来看看这个神仙优化器是如何训出来的。在探讨其具体模型结构之前,我们先来理清楚优化器训练所需要的是什么样的数据集,以及目标函数是什么。
优化器训练的数据集
learned optimizer(下文简称 OPT_L )的训练所需要的每个训练样本x都是一个需要在某任务上训练的深度学习模型,样本的标签y则是该模型在其对应任务上的开发集loss,即训练集为:
X=Set({Model_1, Model_2,...,Model_n})
Y=Set(DevLoss_{Model_1}, DevLoss_{Model_2},...,DevLoss_{Model_n})
对于数据集里的每个训练样本 x (模型),都
- 可以采用不同的模型结构
- 用于完成不同的任务,称为inner-task
- 有属于自己的数据集,称为inner-dataset
比如,
- Model_1 可能是一个用于文本分类的RNN,用的inner-dataset是YELP-5
- Model_2 可能是一个做图像分类的CNN,用的inner-dataset是数据集CIFAR-10
作者实际共设置了6000个不同种类的模型。涵盖了RNNs、CNNs、mask auto regressive flows、全连接网络、语言模型、VAE、simple 2D test function、quadratic bowls等…
优化器训练的目标函数
我们都知道,通常一个深度学习模型的训练就需要极大的算力支撑。而此处令人咋舌的是,按照上述设定,我们需要完成6000个模型的训练才能为learned optimizer( OPT_L )完成1轮训练。
OPT_L 的一轮训练过程大致如下图所示(为说明得更加清楚,图中采用的是full batch进行参数更新,也就是每个batch直接包含全部样本):


- 先用 OPT_L 训练n个Model(理想情况下,每个Model应该一直训练到收敛,但考虑到算力的问题,实际上训练240~360个step就停止了)
- 每个 Model_i 都有自己的inner-dataset,我们在它的inner-dataset的验证集上计算 Model_i 的损失函数 loss_{inner}^i
- OPT_L 的损失函数即为所有Model的 loss_{inner} 的平均
- 用 OPT_L 的损失函数对其进行参数更新
优化器的结构
其实learned optimizer的概念并不是在这篇论文中首次提出来的,不过论文作者argue了learned optimizer的结构和优化器训练所基于的任务集都会非常非常影响最终learned optimizer的表现。因此本文提出了一种层级的优化器结构,实验表明优于前人提出的learned optimizer结构。
设计learned optimizer结构的关键是平衡计算效率和表达能力。
ps:预训练时代的军备竞赛可以疯狂追求模型表达能力,不顾及计算效率(想想BERT和Google T5放出时的恐惧)。但是优化器模型就不能这么任性了,TPU也耗不起
因此,优化器结构一般都不会太复杂,如下图所示


上图的优化器结构是ICML2019上提出的,使用了一个全连接网络(Feed-Forward,FF)。当模型完成了一个step的训练后,就用这个FF对每个参数进行更新。FF的输入端是模型某个参数 w 的梯度,以及该参数的其他feature(如Momentum等)。FF的输出端是 w 的更新值 \Delta w ,则该参数将被更新为 w+\Delta w 。注意,这个FF每跑一次,只完成了一个参数的更新。


上图就是paper中提出的优化器结构了。下半部分的FF与上面ICML2019的优化器实现类似,都是用于求某个参数的更新值,称为Per-parameter FF。与之前不同的是,这个FF还会接收到全局信息(如train/valid loss),以及该参数所在张量的信息(如张量形状,gradient norm等)。相关信息来自于上方的LSTM。文中称其为Per-tensor LSTM。
实验
与常见优化器的比较
下图展示了与常见优化器(AdamLR、Adam8p、opt_list)的比较结果。实验中,总共测试了100个任务下使用learned optimizer后的性能提升比例。在各个任务上提升比例分布用箱图表示。


纵轴代表了不同设置下的三个basline优化器。最上面3个Global XXX的设定是,该baseline优化器对于所有任务都采用相同的超参数。而下面6个Per Task XXX对不同任务可以采用不同超参数,括号中的XXX Trial代表尝试调参的轮数。
每一种baseline,都对应了两条同色系的箱图。这是因为用于测试的100个测试任务中,有一部分是learned optimer训练过程中见过的,有一部分从未见过。同色系的两个箱图中,上面那条代表在见过的那些任务上的提升效果,另一条代表在从未见过的那部分任务上的提升效果。
图中箱图的分布并不十分集中,可见提升效果对于不同的任务也各不相同。但总体来说,与适度调参的baseline相比,都有一定程度的提升效果。
隐性的正则化惩罚项
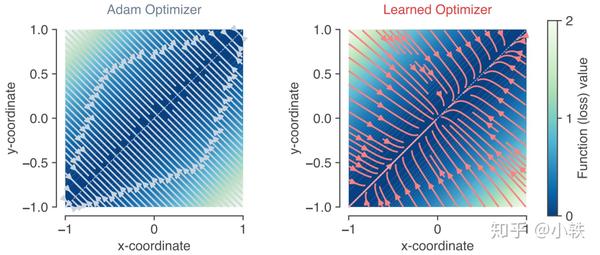
在机器学习中,时常会在目标函数中加入正则化惩罚项,从而对模型的复杂度进行规约。下图展示了Adam和learned optimizer在优化目标函数 f(x,y)= \frac{1}{2}(x-y)^2 时的收敛轨迹。显然直线 y=x 上目标函数最小。但可以看到Adam会直接垂直地收敛到 y=x 上。而learned optimizer在收敛过程中还会有逐渐接近原点的趋势。作者认为这是由于接近原点处的(x,y)范数较小,表明learned optimizer有隐式地进行正则化规约。

可以优化自己的优化器
最后,Google Brain团队脑洞大开地用这个learned optimizer再从头训练一个新的自己!作为比较的是,作者在训练它的时候使用的两种优化器设置(图中橙色和绿色曲线)。可以看到learned optimizer取得了非常相近的训练曲线。作者认为,这个实验进一步证明了该优化器的超强普适性。因为,对优化器进行优化是一个全新的任务,与这个优化器训练过程中见过的所有任务都完全不同。


小结
一个可以不用调参、适用于所有训练任务的优化器。如此的脑洞大开、又敢想敢做,不知道除了Google还有哪里可以。
文章被以下专栏收录
